: 출처 : http://www.jkelec.co.kr/img/lecture/arm_arch/arm_arch_4.html
ARM Architecture | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
* Update history - 2012.9.11 : 초기 Release | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
7. ARM Instruction Sets 7.1 Understanding ARM Instruction set 7.2 ARM Instruction sets 7.3 Data Processing Instructions 7.4 Multiply Instructions 7.5 Load/Store Instructions 7.6 Load/Store Multiple Instructions 7.7 Branch Instructions 7.8 Status Register Access Instructions 7.9 Software Interrupt Instruction 7.10 SWP Instruction 7.11 Conditional Execution 8. Thumb Instruction Sets 8.1 Thumb Instruction 특징 8.2 Thumb Instruction 제약 사항 8.3 Thumb, ARM Instruction 비교 8.4 ARM/Thumb Interworking 9. AAPCS 9.1 Procedure Call Standard for the ARM Architecture 9.2 Function Parameter Passing | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
7. ARM Instruction Sets 7.1 Understanding ARM Instruction set ARM Instruction Set은 ARM 명령어들 즉 어셈블리어를 이야기 하는 것입니다. 대부분은 C 코드를 이용해서 작업을 합니다만, 어셈블리어도 어느정도는 숙지하고 있어야 하는 몇가지 이유가 있습니다. (1) ARM 어셈블리어를 잘 파악하고 있으면 ARM의 구조를 더 잘 이해할 수 있습니다. (2) 전통적인 ARM의 Startup 코드는 스택이 초기와 되기 전에는 C로 작성을 할 수가 없습니다. 최근 Cortex 계열은 Reset 벡터의 초기 번지가 Stackaddress여서 C코드 만으로도 부트로더 작성이 가능 합니다. (3) C컴파일러의 최적화가 아주 잘 되어 있지만, 사람이 주의해서 작성하는 어셈블리 코드보다는 최적화 할 수 없습니다. (4) Debugging in detail (instruction level debugging) 일반적인 ARM 어셈블리어 형식 입니다. 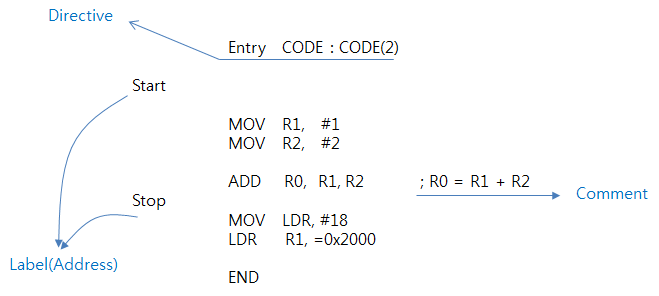 - Directive : 어셈블리 코드의 특성을 지정하는 지시어 입니다. - Label : 반드시 Space없이 첫 번째 컬럼에 위치해야 하고, Label 자체가 Address가 됩니다. - Comment : 주석은 ";" 문자 이후로 작성을 하면 됩니다. - Instructions(ADD, MOV, LDR ...) : 명령어들은 반드시 앞 부분에 적어도 하나 이상의 Space가 있어야 합니다. 7.2 ARM Instruction sets ARM Processor는 2가지 명령어 세트를 지원하는데 32bit ARM 명령어와 16bit Thumb 명령어가 있습니다. Thumb 명령어는 모든 ARM 프로세서에서 지원하는 것은 아니고 Thumb 특성을 지원하는 Core에서만 사용이 가능 합니다. 최근 Cortex 계열에서는 16bit, 32bit 명령어를 같이 사용할 수 있는 Thumb-2 Instruction도 지원 합니다. 심지어 Cortex-M3의 경우에는 Thumb-2 Instruction만 사용이 가능 합니다. 8bit 길이의 Jave Byte Code도 사용 할 수 있는데 이것도 Thumb 명령어와 같이 모든 ARM Processor가 지원하는 것은 아닙니다.
7.3 Data Processing Instructions (1) Instructions  < Cond > 해당 명령의 조건 실행 플래그입니다. 해당 플래그를 통해 명령을 CPSR의 플래그 상태에 따라 선택적으로 실행을 할 수 있습니다. ARM에서 지원하는 굉장히 강력한 기능으로 조건부 실행을 잘 이용하면 분기문을 최대한 줄여 시스템 성능을 향상 시킬 수 있습니다. < I > Operland 2로 지정되어 있는 부분이 Immediate Operand 인지 아닌지 여부를 나타내는 비트 입니다. 즉 25번필드[I] 가 "0" 이면 [11 : 0] 가 shifter operand로 동작을 하고 "1" 이면 Immediate Operand로 동작 합니다. Immediate Operand라 함은, 예를 들어 MOV R0, #0x01234 라고 했을 경우 #0x1234를 가리키는 말입니다. < Opcode > 데이터 프로세싱 명령 중 어떤 명령인지를 나타내는 필드 입니다. 해당 필드와 명령어는 다음과 같습니다.
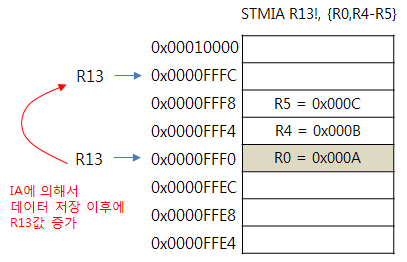
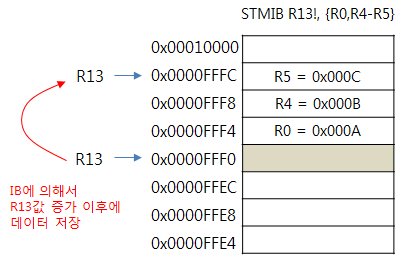
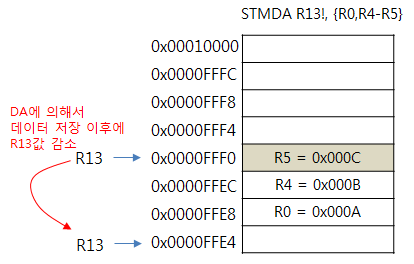
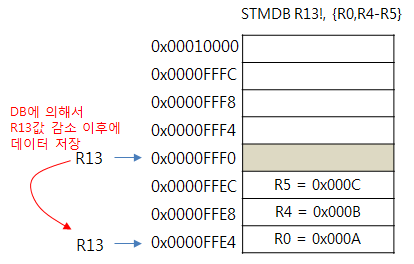
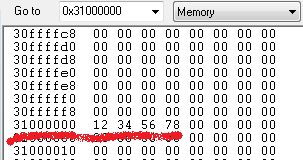
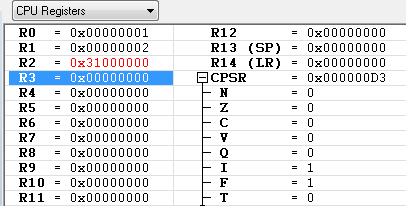
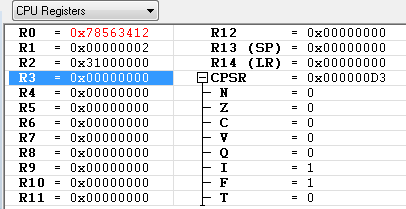
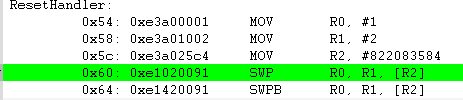
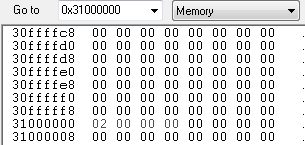
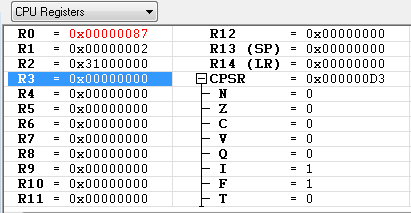
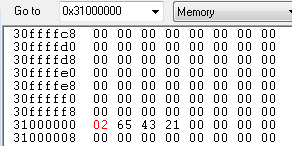
< S > S 비트가 1인 경우는 데이터 프로세싱 명령의 결과가 CPSR에 영향(Rd의 레지스터가 PC인 경우 SPSR의 값으로 CPSR을 복원)을 미칩니다. 즉, 0인 경우에는 CPSR은 변하지 않습니다. < Rn > ARM 데이터 프로세싱 명령은 그 결과와 첫 번째 오퍼랜드는 항상 레지스터로 지정해야 합니다. Rn은 첫 번째 오퍼랜드를 가리키는 것으로 위에서 Op1으로 표기한 것에 해당합니다. ARM에서 한번에 볼 수 있는 범용 레지스터는 sp, lr, pc 등을 포함해서 r0~r15 까지입니다. 즉, 4Bit를 통해 레지스터를 나타내게 됩니다. 해당 필드는 명령에 따라 사용되지 않기도 합니다. MOV나 MVN등이 이에 해당합니다. < Rd > 오퍼레이션의 결과가 저장될 레지스터를 의미합니다. 역시 레지스터를 가리키므로 4Bit를 사용하고 모든 명령에서 디폴트로 사용되는 필드. ARM의 데이터 프로세싱 명령의 결과는 항상 레지스터로 들어갑니다. < Operand 2 > Immediate Operand 혹은 레지스터 Operand 입니다. <I> 필드가 0일 경우 레지스터 입니다. (2) Syntax : <operation>{cond}{s} Rd, Rn, operand2 - Operand2 is a register ADD R0, R1, R2 - Operand2 is immediate value BIC R1, R2, #0xFF - Operand2 shifted value ADD R0, R1, R2, LSL #2 SUB R0, R1, R2, LSR R3 - Data movement MOV R0, R1 MOV R0, #0x1 - Comparisons set flags only CMP R0, R1 CMP R2, #0x01 (3) Immediate value  Immediate value(상수 값)= ROR immed_8 by 2*rot MOV R0, #0xFF000000 MOV R0, #0x12 MOV R0, #0x104 ; 100000100 --> permitted MOV R0, #0x102 ; 100000010 --> not permitted MOV R0, #0x12345678 ; 10010001101000101011001111000--> not permitted 위의 예제에서 상수 값으로 "#0x104" 는 사용할 수 있는데 "#0x102", "#0x12345678" 값으로 올수 없는 이유는 무엇 일까요? "ROR immed_8 by 2*rot" 의 수식을 잘 살펴 보시기 바랍니다. 어렵다구요 ? ^^ 네. 쉬운 계산이 아닐 수 있습니다. 우선 "#0x12345678" 값은 쉽게 판단이 될것 같은데요. Rotate없이 표현 가능한 값의 범위가 8bit 를 넘었습니다. "#0x102" 는 왜 안될가요 ? 쉽게 생각하면 8-bit immediate 값을 #rot 값을 2배 한만큼 오른쪽으로 로테이션을(ROR) 해서 Immediate value을 만들 수 있는 값을 반드시 상수로 사용해야 한다는 말입니다. 역시 말로는 잘 설명이 되지 않네요. 아래 그림들을 참조 하시기 바랍니다. 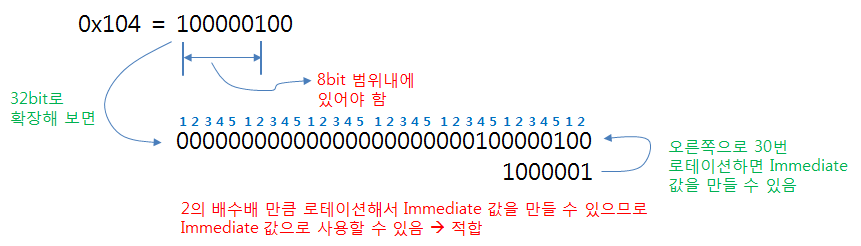 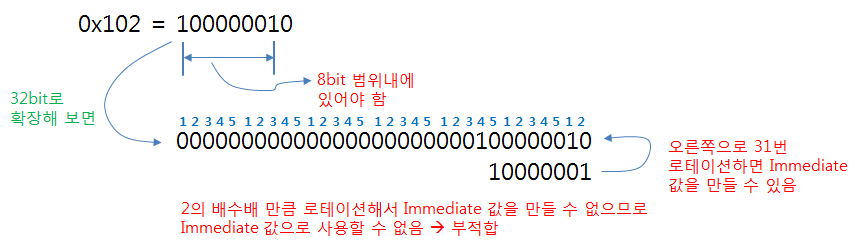 아래 Immediate value의 또 다른 예제 입니다. MOV r0, #0xfc000003 ; 11111100000000000000000000000011 r0에 상수 값 0xfc000003을 넣는 명령입니다. 해당 값은 8Bit 값 0xFF를 32Bit로 확장하고 오른쪽으로 6번 Rotate 시킨 값입니다. 그래서 에러가 나지 않습니다. (4) 32-bit Instruction format MOV R0, #1 굉장히 단순한 예제 인데요. 위에서 배운 32-bit Instructions 포맷을 분석해 보도록 하겠습니다. 코드를 Disassebly 해보면 "0xE3A00001(1110 001 1101 0 0000 0000 0000 00000001)" 입니다.  Instruction 포맷을 다시한번 살펴 보면 아래와 같습니다. [31:28] : 1110 - 7.11 Conditional Execution 에서 배울 예정 입니다. 우선은 그냥 "1110" 은 Always execution flag 라고 알아 두시기 바랍니다. [27:25] : 001 - Operland 2로 지정되어 있는 부분이 Immediate Operand이므로 25번 비트가 "1" 입니다. [24:21] : 1101 - Opcode "MOV" 는 "1101" 입니다. [20] : 0 - 명령어 Opcode에 "S" 가 붙지 않았으므로 CPSR에 영향을 미치는 명령어는 아닙니다. [19:16] : 0000 - Rn 부분으로 레지스터 번호를 표현 합니다. 만약 "MOV R2, #1" 였다면 Rn 이 "0000" 이 아니라 "0010" 일 것입니다. [15:12] : 0000 - Rd 부분이 없으므로 "0000" 입니다. [11:0] : 8bit Immediate value 로서 "#1" 에 해당하는 "00000001" 입니다. * 참고 MOV R2, #1 명령에 대한 32-bit Instruction 포맷 = 0xE3A02001(1110 001 1101 0 0000 0010 0000 00000001) (5) Examples R0 = 0x00 R1 = 0x22 R2 = 0x02 R3 = 0x00 R4 = 0x00 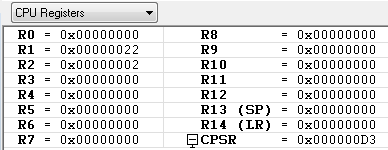 레지스터의 값들이 위와 같을때 아래 예제들을 차례대로 수행 했을때의 각각의 레지스터 값은 ? AND R0, R0, #0xFF ; 0x00 & 0xff = R0의 값은 변환 없음  ADD R0, R0, #1 ; R0 = R0 + 1 = 0x1 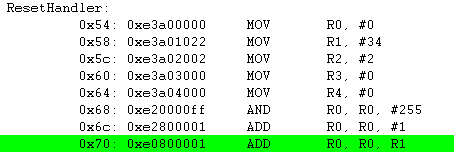 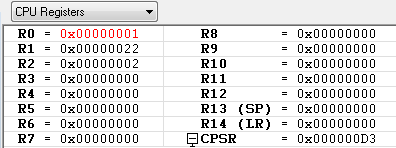 ADD R0, R0, R1 ; R0 = R0 + R1 = 0x01 + 0x22 = 0x23 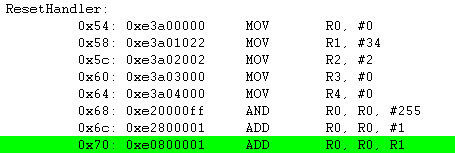 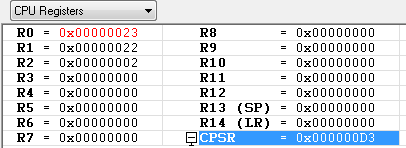 LSL R1, R0, #2 ; 0x23(100011) LSL #2 = 0x8C(10001100) -> 참고로 왼쪽으로 2번 쉬프트 하면 *4 를 한것과 같습니다. 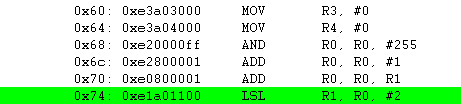 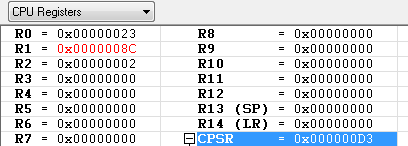 SUB R3, R2, R1, LSR R2 R3의 값이 0xFFFFFFDF 로 복잡한 값이 나왔습니다. 왜 이런 결과가 나왔을까요 ? 우선 R1을 오른쪽으로 2번 쉬프트 시키면 0x23이 되고 R2(0x02) 에서 R1(0x23) 을 빼면 결과값이 -0x21가 되고 이 값을 2의 보수로 표시하면 0xFFFFFFDF 가 됩니다. 0x21 = 00000000000000000000000000100001 -0x21 = 11111111111111111111111111011111 --> 0x21의 2의 보수 참고로 2의 보수를 취하는 방법은 원래의 2진수에서 0->1, 1->0 으로 바꾼후에 1을 더하면 되겠지요.  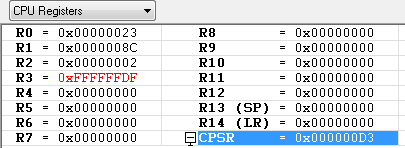 BIC R0, R1, #0xFF00 R1(0x8C) = 0000000010001100 0xFF00(65280) = 1111111100000000 BIC = 0000000010001100 ; 0xFF00 로 Bit clear를 해도 R1의 값은 변화가 없네요. 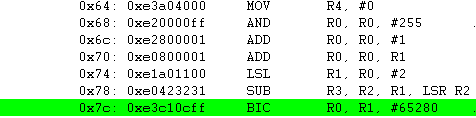 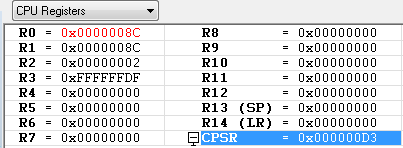 RSB R0, R1, #0 ; #0 - R1(0x8C) = 0xFFFFFF74(0x8C 의 2의 보수 값) RSB 명령어는 SUB와는 반대로 마이너스 연산을 수행 합니다. 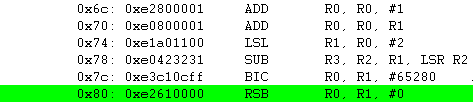 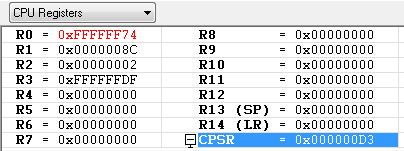 7.4 Multiply Instructions (1) Multiply (Accumulate) Syntax MUL{<cond>}{S} Rd, Rm, Rs ; Rd = Rm * Rs MUA{<cond>}{S} Rd, Rm, Rs, Rn ; Rd = (Rm * Rs) + Rn (2) Examples R0 = 0x01 R1 = 0x02 R2 = 0x03 R3 = 0x04 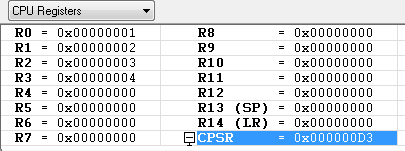 레지스터의 값들이 위와 같을때 아래 예제들을 차례대로 수행 했을때의 각각의 레지스터 값은 ? MUL R2, R0, R1 ; R2 = R0*R1 = 0x02 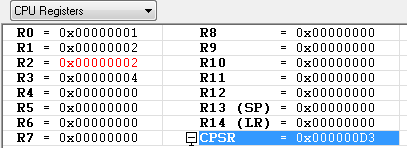 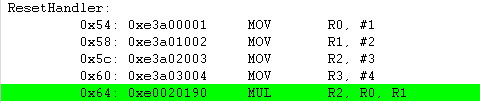 MULS R2, R0, R1 ; R2 = R0*R1 = 0x02 MUL 명령과 같은 명령입니다. 하지만 MUL뒤에 "S" 가 붙으면 명령어 처리가 끝난 이후에 CPSR의 Flag Field 가 연산 결과에 따라서 업데이트가 됩니다. 자세한 사항은 7.11 Conditional Execution 에서 자세히 다루도록 하겠습니다. 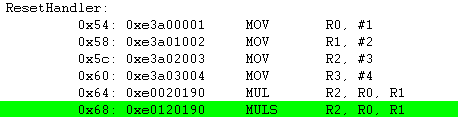 MLA R3, R2, R1, R0 ; R3 = R2*R1 + R0 참 효율적이네요. 명령어 하나로 곱하기 연산과 더하기 연산을 같이 할 수 있습니다. 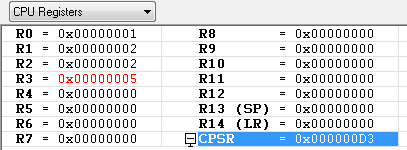 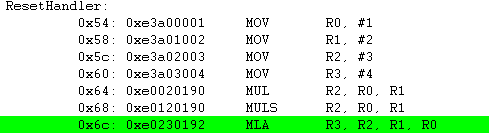 SMULL R3, R2, R1, R0 ; R3,R2 = R1*R0 부호있는 64비트 곱셈 명령어 입니다. R1*R0 하여 상위 32비트는 R2에 하위 32비트는 R3에 저장 합니다. 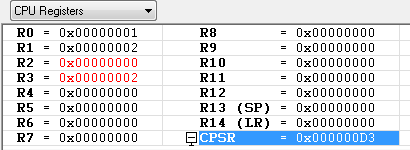 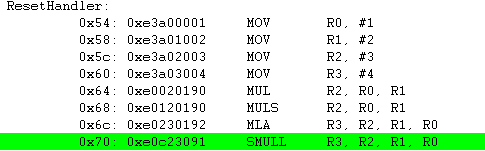 위에서 부호있는 연산이 나왔는데, 좀더 복잡한 예제를 풀어 보도록 하겠습니다. R0 = 0xF0000002 R1 = 0x02 R2 = 0x00 R3 = 0x00 초기 레지스터의 값이 위와 같을때 SMULL 연산 이후의 R2, R3 의 값은 어떻게 될까요 ? 우선 0xF0000002가 음수 이기 때문에 연산을 하기 위해서는 2의 보수값(F0000002의 2의 보수 = 0xFFFFFFE)을 먼저 취합니다. 그리고 나서 0xFFFFFFE * 0x02 = 0x1FFFFFFC 를 합니다. 연산이 끝나고 나서 음수를 표현하기 위해서 다시 0x1FFFFFFC 의 2의 보수를 취합니다. 이때 SMULL이 64비트 곱셈 명령어 이므로 64비트로 확장 합니다. 이렇게 하면 상위 32비트는 0xFFFFFFFF 이고 하위 32비트는 0x04가 됩니다. 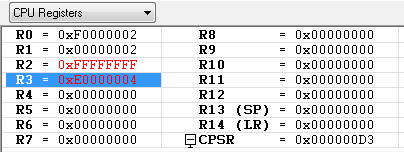 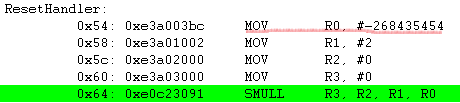 위의 그림에서 "MOV R0, #-268435454" 라고 R0를 초기화 하고 있습니다. 이것은 0xf0000002의 값이 음수(최상위 비트가 1이면 음수이죠)이기 때문에 컴파일러에서 알기 쉽도록 음수 10진수로 표현을 해준것 입니다. 7.5 Load/Store Instructions Memory의 내용을 레지스터로 이동(Load)하거나 레지스터의 내용을 메모리에 저장(Store) 하는 명령어 입니다. 데이터 Access단위에 따라서 아래와 같이 분류 됩니다. Load, Store는 ARM 명령어 가운데 가장 많이 사용되는 명령어 이며 굉장히 중요합니다. 반드시 숙지 하고 있어야 합니다. - Word : LDR, STR - Byte : LDRB, STRB - Halfword : LDRH, STRH - Signed byte : LDRSB - Signed halfword : LDRSH (1) Syntax LDR{cond}{size} Rd, <address> STR{cond}{size} Rd, <address> (2) Addressing Mode - Pre Index : Rd 레지스터에 데이터를 먼저 이동시킨 후 <address> offset을 증가 혹은 감소 합니다. R0 = 0x31000000 R1 = 0x00 R2 = 0x00 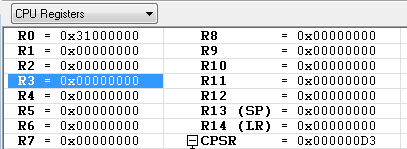 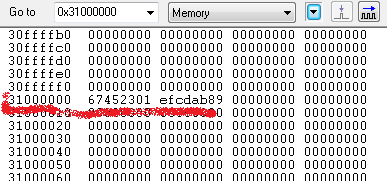 레지스터의 값들과 메모리(메모리 배열은 리틀 엔디언) 값이 위와 같을때 아래 예제들을 차례대로 수행 했을때의 각각의 레지스터와 메모리의 값은 ? LDR R1, [R0] ; R1 <-- M[R0] R0가 가르키고 있는 0x31000000 번지의 메모리 값은 0x67452301 입니다. 그러므로 LDR 연산 이후에 R1에는 0x67452301 값이 저장 됩니다. 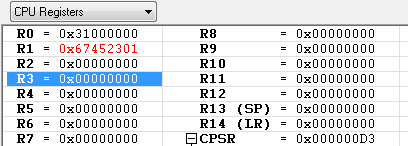  STR R1, [R0, #4] ; R1 <-- M[R0+4] R0가 가르키는 0x31000000 번지에서 4-byte 를 더한 번지의 메모리 위치에 R1(0x67452301) 값을 저장 합니다. 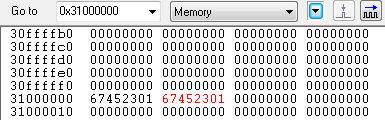 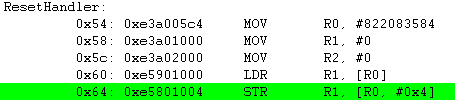 STR R1, [R0, #4]! ; R1 <-- M[R0+4], then R0 <-- R0+4 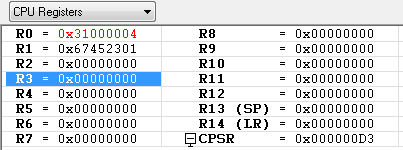 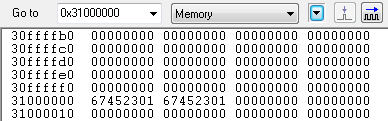 R1에 0x31000004번지의 메모리 내용 0x67452301을 저장하고 난 이후에 R0의 레지스터값 + 0x04 를 수행 합니다. 예제에서 0x30000000, 0x30000004 번지의 내용이 동일해서 혼동 뒬수도 있지만 R1에는 R0레지스터값 + 0x04 = 0x30000004 번지의 값이 저장이 된다는 것을 기억 하시기 바랍니다. 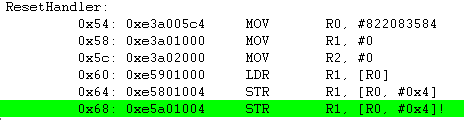 - Post Index: Offset calculation after data transfer R0 = 0x31000000 R1 = 0x00 R2 = 0x04 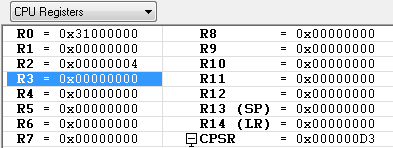 레지스터의 값들과 메모리(메모리 배열은 리틀 엔디언) 값이 위와 같을때 아래 예제들을 차례대로 수행 했을때의 각각의 레지스터와 메모리의 값은 ? LDR R1, [R0], R2 ; R1 <-- M[R0], then R0 <-- R0+R2 R1에 R0 가 가르키는 0x31000000번지의 메모리값 0x67452301의 값을 저장하고 나서 R0 = R0(0x31000000) + R2(0x04) 가 됩니다. Preindex 방식에서는 R0를 먼저 계산하고 나서 메모리 번지의 값을 R1에 저장하였으나 Postindex 방식에서는 순서가 반대가 됩니다. 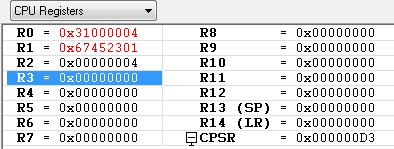  STR R1, [R0], #4 ; R1 <-- M[R0], then R0 <-- R0+4 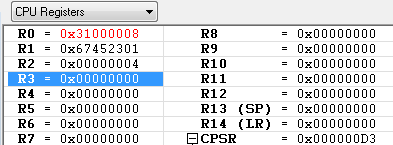 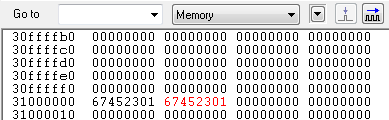 레지스터 R1의 값 0x67452301을 메모리 0x31000004 번지에 저장을 하고난 이후에 R0 = R0(0x310000004) + 0x04 를 수행 합니다. 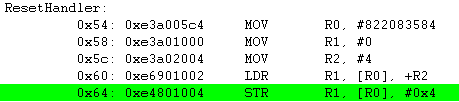 (3) Literal Pool 32bit의 모든 값을 가질 수 없고 12bit를 가지고 일정 형식에 맞추어서 사용해야 합니다. Immediate value 에서 자세히 설명 했던 내용입니다. MOV R0, #0x12345678 ; illegal (build error) LDR R0, =0x12345678 ; legal (build success) MOV R0, #0x104 ; legal MOV R0, #0x102 ; illegal 위의 예제에서 0x12345678 값을 LDR 명령어를 사용하면 제약 없이 사용이 가능한 것을 알수 있습니다. LDR명령어를 사용하는 것이 편해보이기는 하지만 메모리에 접근하기 때문에 속도는 많이 느려지겠지요.. 7.6 Load/Store Multiple Instructions LDR, STR 명령어와 기능은 동일 하지만 Rn레지스터 값이 가르키는 메모리 위치애 여러개 레지스터 값들을 저장 할 수 있습니다. (1) Syntax LDM{cond}{addr_mode} Rn{!}, <register_list>{^} STM{cond}{addr_mode} Rn{!}, <register_list>{^} (2) Addressing Mode - IA : increment after - IB : increment before - DA : decrement after - DB : decrement before (3) Examples * 레지스터 값들 R0 = 0x000A R4 = 0x000B R5 = 0x000C R13 = 0xFFF0 STMIA R13!, {R0,R4-R5} 연산의 결과는 ? STMDA R13!, {R0,R4-R5} 연산의 결과는 ? - Stack 에서 POP, LDMIA 대신에 아래와 같이 사용이 가능 합니다.
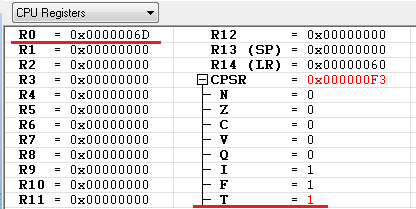
참고로 우리가 지금까지 사용해 왔던 MOV, ADD 명령어 뒤에 Mnemonic 없이 사용을 하면 "Always" 가 적용되어서 실행이 된 것입니다. (1) Condition Flag Change Condition Flag변경은 Data Processing Instructions 에 의해서만 영향을 받으면 명령어 뒤에 "S" Prefix를 사용해야만 합니다. Condition Flag는 CPSR레지스터의 [31:24] 비트 필드에 정의 되어 있습니다. 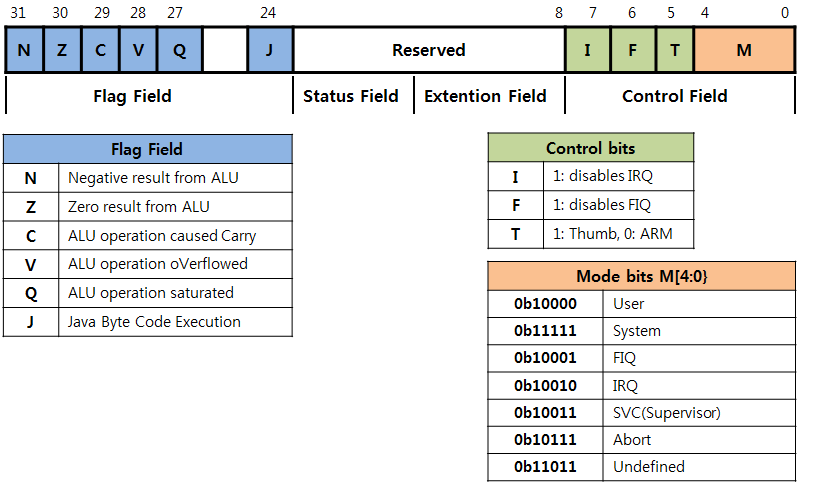 설명이 조금 복잡한가요. 예제를 통해서 살펴 보도록 합시다. (1) Examples1 NZCV 플래그가 변화하는 예제 들입니다. 여기서 N(Negative), Z(Zero result) 까지는 명확한것 같은데 Carry, Overflower 는 어떻게 다른 것일 까요 ? 아래 예제들을 수행하면서 차이점을 비교해 보시기 바랍니다. 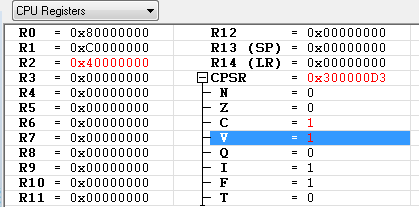  - N : 연산의 결과 R2(0x40000000)의 최상위 비트가 "1" 이 아님 - Z : 연산의 결과 R2가 0x0 이 아님 - C : 32-bit 를 넘어 섰으므로 Carry 가 발생 - V : ARM 에서 Overflow 를 검출하는 방식은 MSB 이전 비트에서 발생한 Carry("0" 과 "1" 을 더해도 Carry가 발생하지 않았으므로 "0")와 MSB에서 발생한 Carry("1" 과 "1" 을 더해서 Carry 가 발생 했으므로 "1")의 값이 달라지는 경우에 Overflow가 검출 됩니다. 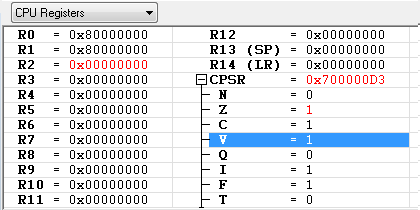  - N : 연산의 결과 R2(0x00000000)의 최상위 비트가 "0" 이므로 Negative 발생하지 않음 - Z : 연산의 결과 R2가 0x0 이므로 세팅 - C : 32-bit 를 넘어 섰으므로 Carry 가 발생 - V : MSB 이전 비트에서 발생한 Carry("0" 과 "0" 을 더해도 Carry가 발생하지 않았으므로 "0")와 MSB에서 발생한 Carry("1" 과 "1" 을 더해서 Carry 가 발생 했으므로 "1")의 값이 달라지는 경우에 Overflow가 검출 됩니다. 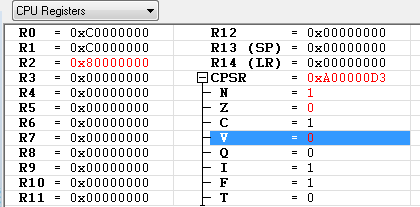  - N : 연산의 결과 R2(0x80000000)의 최상위 비트가 "1" 이므로 Negative 발생 - Z : 연산의 결과 R2가 0x0 이 아님 - C : 32-bit 를 넘어 섰으므로 Carry 가 발생 - V : MSB 이전 비트에서 발생한 Carry("1" 과 "1" 을 더해서 Carry가 발생했으므로 "1")와 MSB에서 발생한 Carry("1" 과 "1" 을 더해서 Carry 가 발생 했으므로 "1")의 값이 다르지 않으므로Overflow가 검출 되지 않습니다. (2) Examples2 ADD R0, R1, R2 --> does not update the flags( "S" Prefix 가 없음 ) ADDS R0, R1, R2 --> update the flags ( "S" Prefix 가 있음 ) 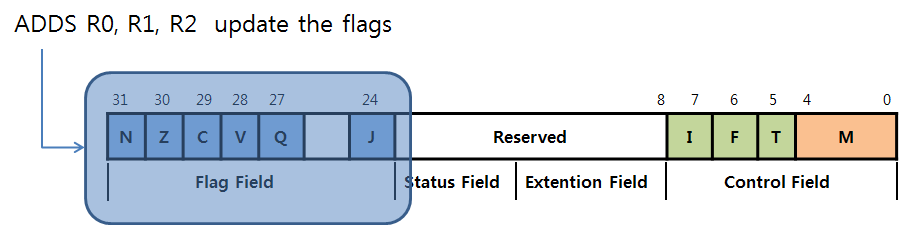 SUBS R2, R1, R0 -- SUBS 명령 실행 이후에 CPSR의 condition flag가 업데이트 됩니다. ADDEQ R3, R1, R0 -- condition field 에 Z flag 가 Set 되어 있으면 실행이 되고 그렇지 않으면 NOP(단순히 CPU의 1Clock을 소비)명령이 실행 됩니다. condition field 에 Z flag 가 Set 되었다는 의미는 R1, R0 의 값이 같아서 R3에 "0" 이 저장이 되었다는 의미 입니다. 참고로 CMP, TST, CMN, TEQ instructions 등의 비교, 검사 명령어 들은 "S" Prefix 가 없이도 CPSR의 condition flag 가 업데이트 입니다. 다음 구문을 Conditional Execution을 사용했을 경우와 안했을 경우로 구분해서 비교해 보세요. if(a==0) a = a + 1; else a = a – 1;
조건부 명령을 사용함으로서 instructions 을 2개나 줄였고 가장 중요한 것은 branch 명령없이 구현을 했다는 것입니다. branch 명령은 ARM pipeline을 무너뜨리기 때문에 성능에서 굉장히 치명적입니다. 8. Thumb Instruction Sets Thumb 명령어는 ARM 명령어에 비해서 16bit라는 명령어의 길이 때문에 많은 제약이 있습니다. 가장 단점은 조건부 실행 명령을 사용할 수가 없다는 것입니다. Thumb 명령어는 ARM을 이해하는 있어서 큰 부분을 차지하지는 않다고 생각 되기 때문에 간단하게 특성 정도만 확인하고 넘어 가도록 하겠습니다. 8.1 Thumb Instruction 특징 (1) 16-bit length instruction set (2) ARM 명령어보다 코드의 집적도가 높습니다.( about 65% of ARM instruction ) (3) 일반적으로는 32bit ARM명령어 보다는 속도가 느리지만 16bit memory 시스템에서는 그렇지 않을 수도 있습니다. 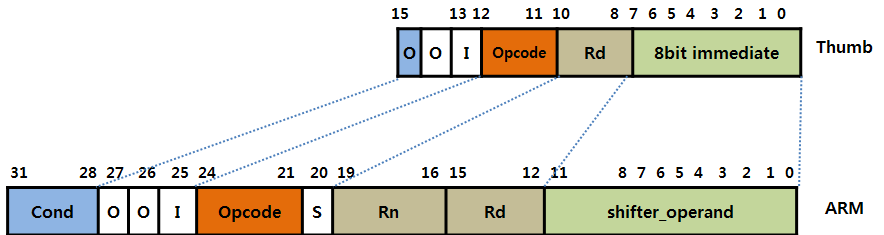 8.2 Thumb Instruction 제약 사항 - Limited Access to Registers : R0-R7 registers are accessible. - Narrow Range of Immediate Value - Not Flexible for Exception Mode - Exception Handler should be executed in ARM mode. : Exception이 발생하면 항상 ARM 모드로 전환이 됩니다. - Limited conditional instruction. - Branch instructions can be executed conditionally. - Inline Barrel Shifter is not used. 8.3 Thumb, ARM Instruction 비교 아래 코드를 ARM 명령어와 Thumb 명령어로 작성하고 비교해 보시기 바랍니다. if(x>=0) return x; else return –x;
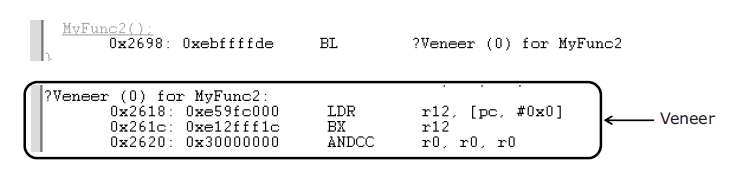
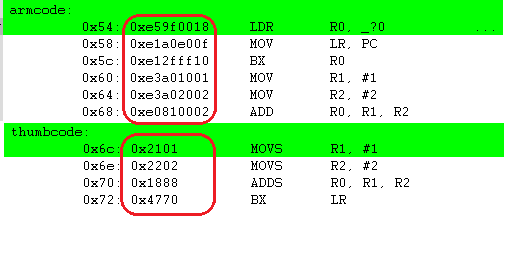
위의 표에서 16-bit bus 일경우의 access 횟수를 보면 오히려 Thumb 명령어가 효율을 보이기도 합니다. 8.4 ARM/Thumb Interworking ARM 모드와 Thumb 모드를 같이 사용 할 수가 있습니다. 하지만 동시에 명령어 들을 섞어서 사용할 수 있는것은 아니고 ARM 모드에서 BX branch명령어에 의해서 Thumb 모드로 전환을 할수가 있고 다시 Thumb 모드에서 BX 명령어를 이용해서 ARM 모드로 복귀 할 수 있습니다. (1) BX Instruction BX{cond} Rm CPSR.T <-- Rm[0], PC <-- Rm & 0xFFFFFFFE BX명령어는 일반 분기명령어와 비슷한것 같지만 조금 다릅니다. 이유는 32bit ARM 모드에서 Thumb 모드로 전환을 할때 32bit 명령어 에서 16bit 로 변경되면서 PC의 주소 증가하는 값이 4byte에서 2byte로 바뀌기 때문에 그런 것입니다. 당연히 Thumb 모드에서 ARM 모드로 다시 복귀 할때는 반대의 경우 이겠죠? 조금 어렵죠 ? 예를 들어서 설명 하도록 하겠습니다.
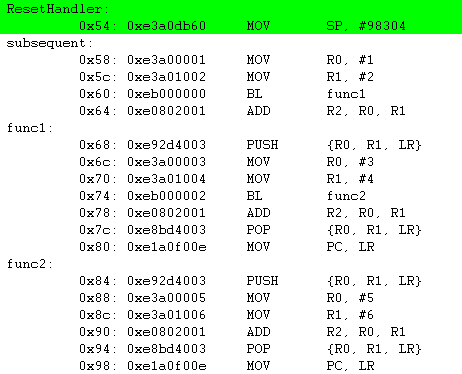
* 참고로 scratch register들은 서브루틴 호출시 변경이 있을 수 있는 위험이 있는 레지스터 입니다. 그러므로 서브루틴 호출시 Stack에 백업한 이후 서브루틴을 호출 해야 합니다. 위의 표에서 알수 있는 것은 함수를 호출할때 함수의 인자 4개 까지는 r0 ~ r3에 저장이 되어 호출이 되고 함수 에서 return에 의한 결과 값은 r0에 담아서 함수를 호출한 메인 함수로 값을 전달하고 있음을 알수 있습니다. 그럼 함수의 인자가 4개 이상인 경우에는 어떻게 되는 것일까요? 5번째 인자 부터는 Stack에 저장한후 함수 에서 POP해서 사용합니다. Stack은 메인 메모리를 사용하므로 가능하면 함수 인자는 4개 까지만 사용하는 것이 성능 향상에 도움이 됩니다. 9.2 Function Parameter Passing void main(void) { int sum; // R0 레지스터에 a+b+c+d+e 의 합이 저장되어 return이 됩니다. sum = func1(0, 1, 2, 3, 99); } int a --> R0 int b --> R1 int c --> R2 int d --> R3 int e --> Stack Return Value --> R0 int func1(int a, int b, int c, int d, int e) { return a+b+c+d+e; } 위의 C 코드를 Disassembly 해보면 다음과 같습니다. 오른쪽 설명을 참조 하시기 바랍니다. 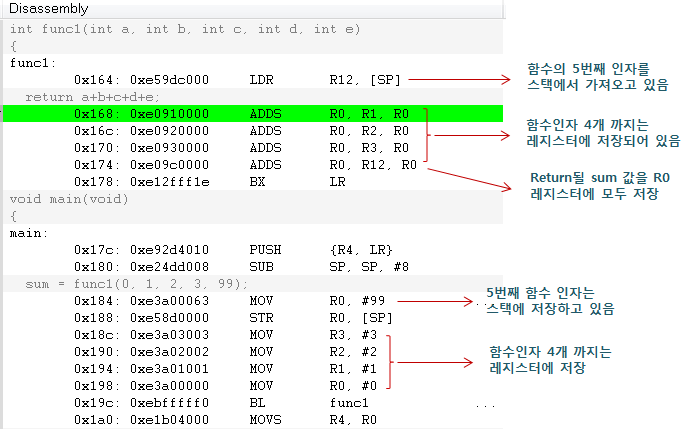 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||


'System_Hacking' 카테고리의 다른 글
| ARM32 netcat static compile (0) | 2015.09.02 |
|---|---|
| UAF (use after free) 예제코드 (0) | 2015.08.19 |
| 64bit 포멧스트링 널바이트 만들어주기 (0) | 2015.04.24 |
| gef peda 의 다양한 아키텍쳐 버젼 (0) | 2015.04.01 |
| 랜덤 라이브러리 무효화 시키기 (0) | 2015.03.02 |
